¿Cómo imaginas una ciudad que no existe? DeepScope

Los urbanistas se enfrentan diariamente a visualizar sus desarrollos en una ciudad que no existe. Gracias a DeepScope plataforma novedosa, desarrollada por el MIT, para la visualización de diseño urbano interactivo, en tiempo real y sin configuración facilita la tarea de imaginar la futura ciudad.
DeepScope intenta sustituir las prácticas comunes de diseño urbano con un enfoque de visualización generativa, aprendido por máquina. Al implementar una red de confrontación generativa convolucional profunda (DCGAN) y CityScope, una interfaz de usuario tangible, este proyecto permite la creación de prototipos y visualizaciones en tiempo real de los procesos de diseño urbano.
La representación visual en arquitectura, diseño y planificación urbana es un factor crítica tanto para el diseño como para los procesos de toma de decisiones. A pesar de los grandes avances en el campo de los gráficos por computadora, la creación de representaciones visuales sigue siendo una tarea compleja y costosa, que generalmente realizan profesionales altamente capacitados. Durante las etapas preliminares de diseño es una tarea especialmente compleja, como los ejercicios de zonificación o el diseño esquemático, ya que se empiezan a tomar decisiones clave, aunque no se dispone de toda la información, especialmente sobre los detalles finales del diseño. Este proyecto intenta sustituir las prácticas comunes de visualización del diseño urbano con un enfoque generativo aprendido por la máquina. Al implementar una red de confrontación generativa convolucional profunda (DCGAN) y una interfaz de usuario tangible (TUI), este trabajo tiene como objetivo permitir la creación de prototipos y visualizaciones urbanas en tiempo real.
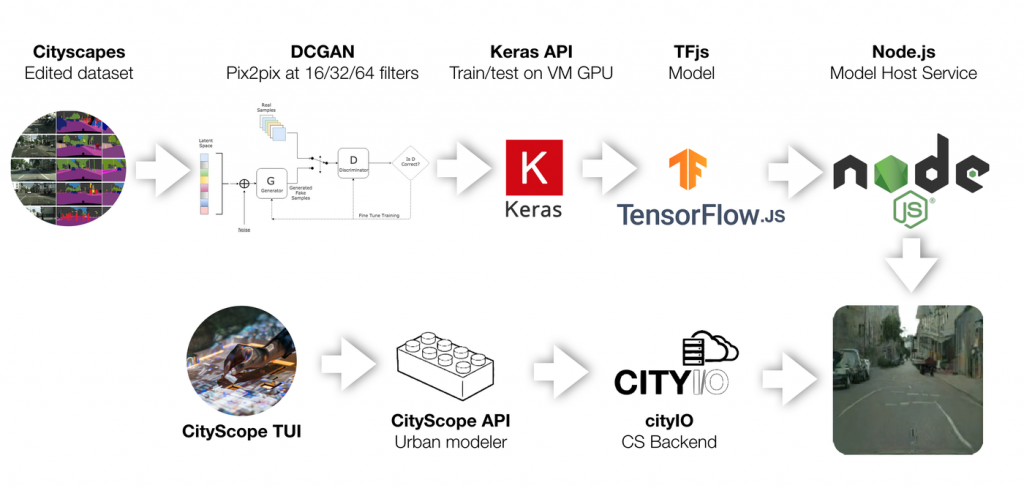
El modelo DCGAN fue desarrollado en Cityscapes, un conjunto semántico de datos de street view. Se utiliza una versión de CityScope (CS), una plataforma rápida de creación de prototipos urbanos, como interfaz de diseño tangible. Después de cada iteración de diseño en CS, el modelo DCGAN genera una representación asociada con la vista de calle seleccionada en el espacio de diseño. También se creó una herramienta ligera, basada en la web y independiente de la plataforma para la visualización y la interfaz de usuario. A diferencia de las técnicas de representación tradicionales, esta herramienta podría ayudar a los diseñadores a centrarse en la organización espacial, la programación urbana y los ejercicios de concentración sin la necesidad de un diseño detallado, procesos de visualización complejos y configuraciones costosas.
Estas herramientas podría apoyar procesos de diseño urbano tradicionales, dándonos una imagen más atractiva y realista de la ciudad. La gran ventaja de esta plataforma es que está diseñada para permitir una interacción lúdica y sin restricciones con un entorno tangible, que se ve aumentada por análisis, simulaciones y predicciones en tiempo real.
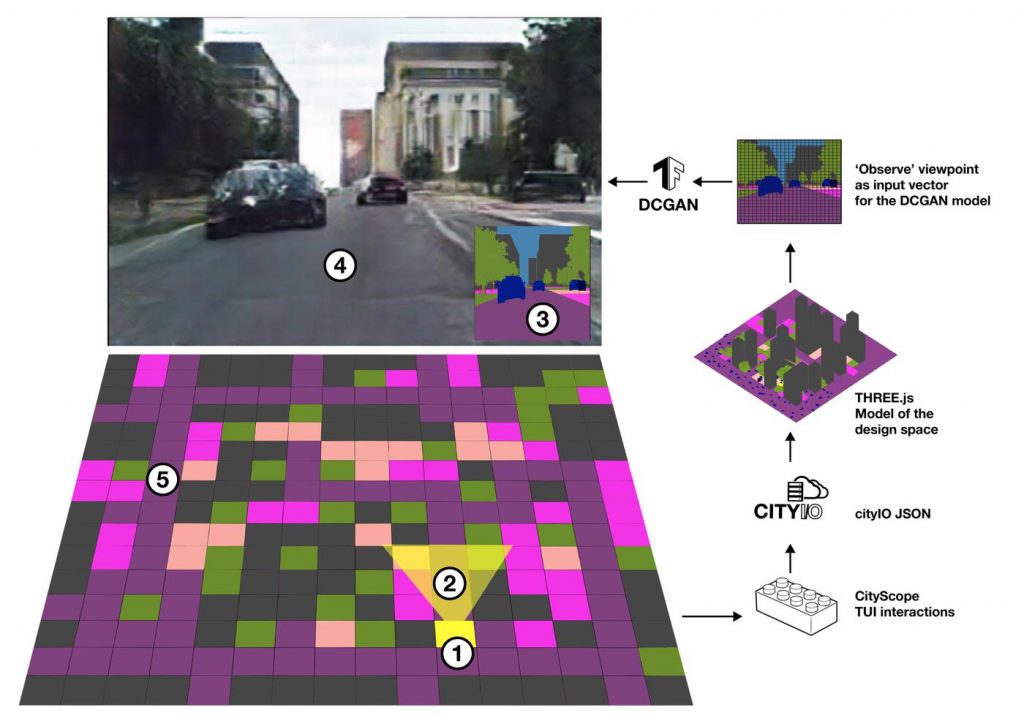
La plataforma DeepScope se diseñó con una cuadrícula de 16×16 de fichas Lego 4×4 que se rellenan aleatoriamente con clones de cinco patrones. Cada mosaico y patrón representan un elemento diferente del uso del suelo o del paisaje urbano: carreteras, edificios, espacios verdes, estacionamientos y aceras. Además, se diseñó un único patrón de «observador» para imitar a un peatón virtual y establecer su ángulo de visión, y cada mosaico está asociado con parámetros virtuales a escala de 10×10 metros.
A medida que los usuarios manipulan los mosaicos a través del TUI y diseñan el paisaje urbano, sus interacciones se visualizan en la superficie de la mesa CS y en la pantalla montada verticalmente. Cada interacción de diseño crea una nueva gama de patrones digitales. Esta matriz se traduce en un entorno 3D en el que cada celda de la cuadrícula se representa a través de su etiqueta y parámetros predefinidos. Por ejemplo, un patrón de vegetación produce un rectángulo verde plano coloreado en valores RGB que corresponden al color de la etiqueta de paisajes urbanos.
Además, este patrón está desencadenando un algoritmo que prolifera los objetos de paisajes urbanos a pequeña escala asociados con esa etiqueta, de modo que en el caso de la etiqueta de vegetación, árboles, arbustos y cercas vivas emergerán en el espacio virtual.
Más información sobre DeepScope.
Fuente: https://www.media.mit.edu



